Description for class UniversalJoint:
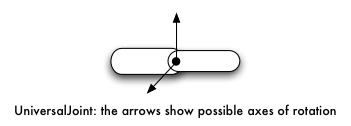
This subclass of Joint is used to link two Link objects together using a universal joint.
A universal joint has two degrees of freedom. It can rotate "up-and-down" and "side-to-side", but cannot "twist". Your wrist is basically a universal joint--your hand cannot rotate without the rest of your arm.
Inherits from Joint
Full API documentation for the class UniversalJoint: